
仿生机械 |
| 编辑:南京曲阜恒丰机械有限公司 字号:大 中 小 |
| 摘要:仿生机械 |
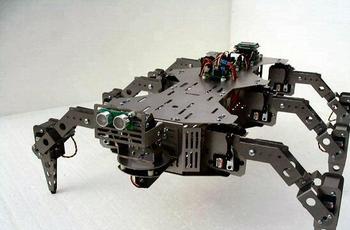 简介 简介模仿生物的形态、结构和控制原理设计制造出的功能更集中、效率更高并具有生物特征的机械。研究仿生机械的学科称为仿生机械学,它是20世纪60年代末期由生物学、生物力学、医学、机械工程、控制论和电子技术等学科相互渗透、结合而形成的一门边缘学科。仿生机械研究的主要领域有生物力学、控制体和机器人。把生物系统中可能应用的优越结构和物理学的特性结合使用,人类就可能得到在某些性能上比自然界形成的体系更为完善的仿生机械。 介绍 模仿生物的形态、结构和控制原理设计制造出的功能更集中、效率更高并具有生物特征的机械。研究仿生机械的学科称为仿生机械学,它是20世纪60年代末期由生物学、生物力学、医学、机械工程、控制论和电子技术等学科相互渗透、结合而形成的一门边缘学科。在自然界中,生物通过物竞天择和长期的自身进化,已对自然环境具有高度的适应性。它们的感知、决策、指令、反馈、运动等机能和器官结构远比人类所曾经制造的机械更为完善。 历史 模仿生物形态结构创造机械的技术有悠久的历史。 15世纪意大利的列奥纳多·达芬奇认为人类可以模仿鸟类飞行,并绘制了 扑翼机图。 到19世纪,各种自然科学有了较大的发展,人们利用空气动力学原理,制成了几种不同类型的单翼机和双翼 滑翔机。 1903年,美国的W。莱特和O。莱特发明了飞机。然而,在很长一段时间内,人们对于生物与机器之间到底有什么共同之处还缺乏认识,因而只限于形体上的模仿。 直到20世 纪中叶,由于原子能利用、航天、海洋开发和军事技术的需要,迫切要求机械装置应具有适应性和高度的可靠性。而以往的各种机械装置远远不能满足要求,迫切需要寻找一条全新的技术发展途径和设计理论。随着近代生物学的发展,人们发现,生物在能量转换、控制调节、信息处理、辨别方位、导航和探测等方面有着以往技术所不可比拟的长处。同时在自然科学中又出现了“控制论”理论。它是研究机器和生物体中控制和通信的科学。控制论是沟通技术系统和生物系统工作原理之间的桥梁,它奠定了机器与生物可以类比的理论基础。 1960年9月在美国召开了第一届仿生学讨论会,并提出了“生物原型是新技术的关键”的论题,从而确立了仿生学学科,以后又形成许多仿生学的分支学科。 1960年由美国机械工程学会主办,召开了生物力学学术讨论会。 1970年日本人工手研究会主办召开了第一届生物机构讨论会,从而确立了生物力学和生物机构学两个学科,在这个基础上形成了仿生机械学。 研究领域 机械 仿生机械研究的主要领域有生物力学、控制体和机器人。生物力学研究生命的力学现象和规律,包括生体材料力学和生体流体力学,生体机械力学和生体流体力学。控制体和机器人是根据从生物了解到的知识建造的工程技术系统。其中用人脑控制的称为控制体(如肌电假手、装具);用计算机控制的称为机器人。仿生机械学的主要研究课题有拟人型机械手、步行机、假肢以及模仿鸟类、昆虫和鱼类等生物的各种机械。 拟人型机械手 拟人型机械手各种动物的前肢从外形和功能上看虽然不尽相同,但它们的内部构造却基本一致。两栖类、爬行类、鸟类和哺乳类动物的前肢骨骼都是由肱骨、前臂骨、腕骨和指骨组成的。人的上肢具有较高的操作性、灵活性和适应性,机械手正朝着与人上肢功能接近的方向发展。人的一个上肢有32块骨骼,由50多条肌肉驱动,由肩关节、肘关节、腕关节构成27个空间自由度。肩和肘关节构成4个自由度,以确定手心的位置。腕关节有3个自由度,以确定手心的姿态。手由肩、肘、腕确定位置和姿态后,为了掌握物体作各种精巧、复杂的动作,还要靠多关节的五指和柔软的手掌。手指由26块骨骼构成20个自由度,因此手指可作各种精巧操作。在这么多自由度的协调配合下,肌肉在瞬间运动下可发出很大的力量,最大出力与自重之比远较人类制造的任何机器都高得多。肌肉的控制机构具有多重自动控制机构和安全机构,从脑部来的指令可以到达手的各个部分。从工程技术上实现这样的机能特征和信息处理系统是很困难的。一般研制的多关节机械手还只限7个自由度的手臂和1个自由度的手爪,也有人在研究3指手爪。此外还有模仿象鼻子等机能的柔性机械手,其特点是具有较高的自适应能力。中国科学院长春光学精密机械研究所于1983年研制成功微型计算机控制的7个自由度的拟人型机械手。 步行机 步行机为了提高移动机械对环境的适应性,扩大人类在海底、北极、矿区、星球和沼泽等崎岖不平地面的活动空间,需要研究模拟生物的步行机构。动物的运动多是通过多关节足来实现的。因此,动物足的形态、机能、运动和姿体稳定控制等是研究步行机的关键。人和鸟类是两足,青蛙、乌龟、犬、马是四足,昆虫是六足,而蟹和蜘蛛是八足,蜈蚣是多足。足的个数直接影响姿体的稳定。六足以上的动物着地至少用三足。由于姿体重心通过足的三点构成平面,静态是稳定的。四足动物慢走时三足同时着地、快跑时两足着地,靠驱体随机姿态稳定调节。两足动物在步行时,对左右而言是一点着地,是不稳定系统,所以控制很困难。一些国家研制了两足、三足、四足、六足、八足的步行机械。日本早稻田大学于1973年研制成WABOt-1的WL-5号两足步行机,东京工业大学于1972年研制成机械蛇模型。中国科学院长春光学精密机械研究所于1981年研制出四足、六足步行机模型。 假肢 分为上肢假肢和下肢假肢。上肢比下肢精巧灵活,结构也较复杂,一般要求假手的外形、构造与人手相近。随着电子技术、生物医学工程的发展,假手已由装饰假手、机械牵引假手发展到肌电假手。肌电假手是大脑通过脊髓和神经系统向有关肌肉发出一组生物 电脉冲,利用装在手臂皮肤表面的电极接受指令而驱动假手运动。这种假手受人的意志控制,能实现多功能的、与人手相似的动作。中国清华大学已于1983年研制出肌电假手。 下肢的主要功能在于负重走路,既要有稳定性、又要有适应性和灵活性。下肢包括髋关节、膝关节、踝关节和足部各小关节。它在结构上要比较坚实、稳定,以适合下肢生理功能的需要。身体的重量经髋关节和股骨头传到双脚。膝关节保证大腿和小腿之间具有一定的相对运动,以保证人体的稳定。美国还进行了在人体外侧安装机械骨骼即所谓“蟹壳”的研究,人的手足动作信息由机械检出后,再来驱动机械骨骼。通过机械骨骼来承受外部力量可使人的力量增大许多倍,即借助机械可扩大人的机能和对外界的适应性。 其他仿生机械 其他仿生机械模仿鸟类、昆虫和鱼类的形态构造特点,研制各种适宜在空中、水下活动的机械技术系统,也是仿生机械的内容。自然界能飞的动物种类接近全部动物的3/4,其中占主要地位的有600多种鸟类和35万多种昆虫。这些飞行动物为人类改进飞机性能和制造新型飞行器提供了天然的设计原型。鸟类和昆虫的某些特殊机能,如蚊蝇和蜜蜂等昆虫灵活机动的陡然起飞,翻转翅翼的高频振动,光面悬垂和空中定息等,都是现代飞机所做不到的。蜻蜓不仅飞得快,而且飞得高,飞得远,是因为它有柔软单薄的翅膀,飞行速度可达50公里/时。蜻蜓翅膀上的翅痣具有消除飞行中翅膀颤动的特点。根据这个特点,在飞机设计中将飞机类似部分加厚,以克服机翼的颤动现象。此外,沙漠蝗、金色鹬的节能飞行等,都是飞行器设计中可资借鉴的。 根据蝙蝠喉头发出的超声波可在空中导航和它对空中食物定位的原理,人类发明了雷达。根据苍蝇、蜻蜓的复眼原理,人类发明了复印机和印刷机的复眼透镜。根据响尾蛇的颊窝能感觉到0.001℃的温度变化的原理,人类发明了跟踪追击的响尾蛇导弹。人类还利用蛙跳的原理设计了蛤蟆夯;模仿警犬的高灵敏嗅觉制成了用于侦缉的“电子警犬”。 仿生海豚 鲸、海豚和各种鱼类经过亿万年的进化,形成了适应于水中的多姿体形。其中有适应于快速航行的仿锤形;适应于水底缓慢运动的平扁形;适应于穿入泥土或石洞间的圆筒形。脊鳍阔大的剑鱼速度可达110公里/时,并能在几秒之内就可达到全速,这是现代快艇所不及的。鱼类除了有适于航行的形体外,同时还有特殊的推进和沉浮机能。人类根据水生动物尾鳍摆动式推进系统的生物力学原理,设计出一种摆动板推进系统。它不仅可以使船只十分灵活地转弯和避开障碍,还可以顺利地通过浅水域或沙洲而不搁浅。僧帽水母用感觉细胞控制浮鳔内的气体使身体沉浮。金枪鱼靠控制体内一种生理化学反应而沉浮。人类根据这些原理研制成潜水艇的沉浮系统。乌贼的体型虽然和鱼不太相同,但运动器官十分完善,它靠收缩腹肌把外套膜中的水从喷嘴迅速射出,借此推进身体前进。人类根据这个原理设计出喷水船。人类还模仿海豚皮肤可减少水阻的特点,制成了“人工海豚皮”。 |
| 上一条:阀门行业六大法宝搭上发展快车 | 下一条:瓦轴追求高端 支撑中国装备高速旋转 |